两位航天员舱外合影来了,航天员首次出舱都干了啥?
·81192是什么(81192是什么(02-14)
·出岛机票紧张票价过(02-14)
·李银河:人生获得快乐(02-14)
·#赚多少钱才会觉得幸(02-14)
7月,中国空间站在中国空间站、中国人和中国宇航员的首次“起飞”方面又取得了重大突破,这对中国来说非常重要。
据中国载人航天工程办公室称,神舟十二号空间站的三名宇航员,包括宇航员刘伯明和唐洪波,穿着中国自主研发的新一代飞天异国情调宇航服,成功退出天河核心舱,并成功完成机械臂上的行人和外骨骼机安装,然后通过机械支撑相互配合,在空间站外组装相关设备。

舱内航天员聂海胜在舱内配合,支持两名航天员走出舱外进行外骨骼手术,成功实施了中国空间站的“蜡外呼啦”活动。这一次非常重要,因为这是中国空间站的第一次空中活动。这一次,机器人手的使用引起了争论。
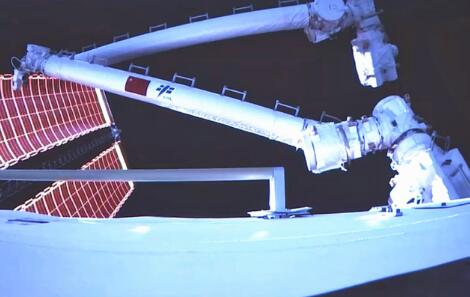
刘伯明站在机械手上,两名宇航员在舱外合影。
如上所述,一旦宇航员离开舱,操纵器的支撑是必不可少的。可以说,这是中国航天员首次在舱外使用。由于操纵器的活动非常强大,因此有必要提前执行相应的任务。在任务执行过程中,可以说,外星活动并不容易,更不用说安装、移动等过程,使航天员面临更多的问题。
起初,宇航员走出驾驶室时必须依靠“安全线”一步一步地向前移动,因此他们没有像许多人所想的那样直接移动到机械手,因此当我们看到“刘伯明站在机械手上”的消息时,我们不应感到惊讶。事实上,这是非常正常的。第一次出舱后,可以说操纵器的应用基本上得到了充分的研究。
但是,在第二次中国宇航员的沙龙外活动中,一切都要方便得多,所以实际上,机械手是宇航员从第一次“布置”沙龙外活动开始的。除了不容易之外,还有一个问题引起了激烈的辩论。
当人们站在一只机械手上时,他们不怕折断吗?
如果你不知道操纵器,你可能会认为操纵器不能处理那种压力,但是如果你知道操纵器,你肯定不会这么认为,但是从操纵器的角度来看,压力远远大于人的重量。
中国的空间站操纵器非常强大。为了突出一些东西,空间站核心模块的操纵器还具有“爬行”功能。整个机械手结构采用“肩3++1+肘1+腕3”示意图,使用灵活,一旦整个空间站的机械臂安装完毕,机械臂布局长度为10.2m,最大可承载25吨重量。这是为了在赫拉克勒斯执行空间站任务。
你可以想象一个能承载25吨重量的机械手。如果有人站在上面,它可以被忽略,没有任何压力。即使你不知道重力问题,即使你使用重力问题,人体重力加上130公斤重的奇异太空服可以毫无压力地完美穿着,所以机械手上的压力很大,还有另一个问题,在太空中,它是浮动状态。你可以说重力的影响很小,或者说在零重力下人体和其他物体会漂浮。根本没有强引力,所以不需要考虑。
而且,即使地球上比较硬的东西是机械手,也没有压力,所以“刘伯明是机械手”,有人担心机械手“断裂”,这是完全不可能的。因此,不知道的人可能会很担心,但对知道的人来说,没有压力。宇航员也可以站在几个机械武器后面,这不是问题。这是一般情况。
操纵器有多强大?

除了我们之前说过的,操纵器还可以承受强烈的重力。实际上,在早期阶段,这个“渲染”是一个非常强大的模型。有人说,世界上许多国家都担心使用机械手来抓取卫星和航天器,特别是美国,因为美国航天中心指挥官詹姆斯·迪金森将军曾说过,中国机械手似乎有能力拦截或摧毁其他国家的卫星。
这完全是“胡说八道”因为所有的物体都是在太空中运动的,所以机械手不可能用这个系统击落或收集来自其他国家的卫星。如果这些物体在没有适当力的情况下相互接触,则可能发生碰撞和飞行。此外,空间站、卫星和航天器不在同一水平,这是完全不可能的。任何偏差都会损坏设备。谁敢,谁能。
因此,这是对“操纵器”的夸大,而“操纵器”是对过于强大的功能的完全夸大。如果它如此强大,世界上所有国家都可以像操纵器一样通过航天器,直接在太空中工作。这可能不是真的,你看。西方国家经常“夸大”中国技术的力量。我们不必在意,只要努力发展我们自己的。正如你所看到的,美国对中国的封锁越多,它就越强大。所以如果你睡得很熟,别人说什么都没关系。
以上就是小编为您带来的“两位航天员舱外合影来了,航天员首次出舱都干了啥?”全部内容,更多内容敬请关注!本文链接:/xxm/4078.html





董明珠多少岁啊(董明珠多

做微商怎么找客源加人(做

绘画加盟有哪些好处(绘画

餐饮明星项目有哪些(明星

酒吧行业成为众多加盟创

现在适合创业的小项目(有

年轻人创业项目推荐(适合

2021年50个创业新项目(202









到付现结是谁出邮费(到付
女贪官将黄金熔炼重铸 藏

官方通报学生趴桌午休收

3同学出车祸开车同学遭索
泉州一小区催缴800万水费
免费办理营业执照是什么

shein跨境电商平台好不好

小红书可以个人免费开店















本周阅读排行榜
- 1农村创业家庭办厂3一8万项目一天
- 家庭办厂项目投资3一8万左右开个不愁销路的小厂,笔者认为要想开个不愁销路的小厂,就要寻到不愁销路的项目。如头上仅有3一8万可投资创业的资金,在这个有限的资金里找不...
- 2 警惕!双面镜为什么不安全[小心
- 有很多人都有住酒店、住宾馆的经历,但是,这里毕竟不是我们的家,所以肯定会有一定的警惕心。特别是女生,在外住确实是很不安全,所以,每当入住的时候,都会好好检查...
- 32020年没本钱干什么挣钱快 月入
- 现在没本钱干什么挣钱快?不起眼的暴利小生意有哪些?今年干什么最赚钱?月入2万的10个小生意做哪个好? 如果自己没有本钱,可以要别人出钱投资,但是自己要负责技术。接下来...
- 4网络创业谈重庆崽儿火锅加盟费多
- 重庆崽儿火锅公司介绍 网络创业重庆帝业饮食文化有限公司旗下有重庆崽儿火锅、百年渝香、淡水河谷养生鲜鱼坊、通宵、柒桌等品牌,其中,重庆崽儿火锅以经营传统重庆老火...
- 5财经今日头条讲光头佬联圣加盟费
- 财经今日头条光头佬联圣品牌水晶饺系列产品先后成功进驻沃尔玛、家乐福、好又多、吉之岛、卜蜂莲花、华润万家等全国大型连锁商超, 点心行业2014年营收规模为2426.67亿元,...
- 6创业商机网讲妈妈十二愿怎么样?
- 妈妈十二愿产后恢复介绍 创业商机网北京美露虹化妆品有限公司一直秉承科学、健康、诚信、安全有效的护理理念,将国际上先进的仪器设备和中国传统的国医古方相结合。 妈...
- 7网贷巴士讲保健品销售加盟 一个
- 网贷巴士首先,需要辨别保健品的真假,选择正规的保健品品牌。保健品行业中,各种骗局让人防不胜防,比如夸大保健品作用,声称可以治疗某些疑难杂症;又或者以次充好,更...
- 8亿航财经谈卓远陶瓷加盟费多少钱
- 亿航财经佛山市三水宏源陶瓷企业有限公司,位于有南国陶都之称的佛山,是一家集科研、开发、生产、销售、多元化经营于一体的大型中外合资企业。公司旗下卓远品牌,荣获...
- 9大和恒粮行加盟怎么样(开大和恒
- 在众多的北京老字号当中,有一个鲜为人知的店铺,它曾与全聚德、瑞蚨祥等老字号齐名,早在上个世纪三十年代。就红遍北平四九城称的上是粮食行业的龙头企业,它就是大和...
- 10银饰加盟月入2万的10个小生意
- 银之美是一家集首饰设计、生产、加工和品牌加盟为一体的知名企业。经过多年的经验积累,结合现代技术,引进先进设备,已经形成以专业化的生产、严密的科学管理,来精心...